Инженер-программист
В 1987 году я увлёкся робототехникой, электроникой и автоматизированными системами управления. Я начинал с разработки оптической схемы системы технического зрения для робота дуговой сварки в Ленинградском ВНИИЭСО.
Технические достижения нашей цивилизации — это плоды труда инженеров на основе работ учёных
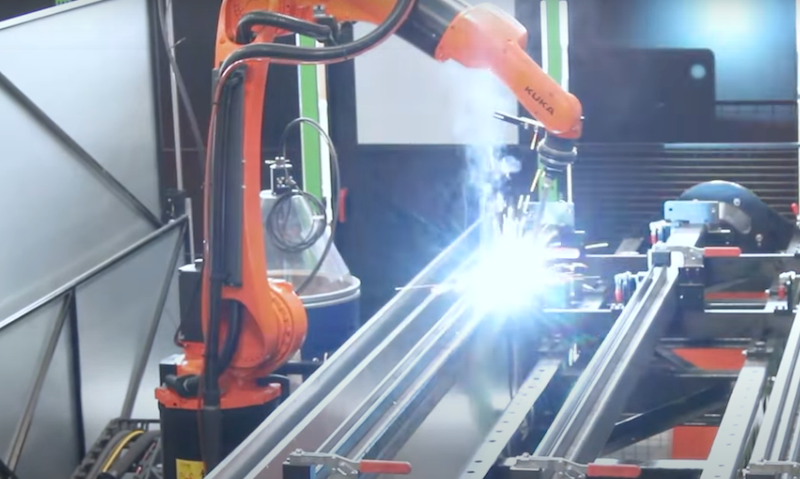
Затем возникла задача разработки ПО для распознавания положения стыка свариваемых деталей на изображении. Распознавание нужно было делать в режиме реального времени, для каждого кадра с частотой 25 кадров в секунду, в условиях сильных шумов: сварочная дуга, дым, брызги расплавленного металла, электромагнитные помехи. При этом самый быстрый из доступных на тот момент процессоров x8086 имел частоту всего 5 МГц!
Публикации:


Языки разработки:
- ASM86
- C
До сих пор горжусь написанной мною программой из 8 строк на ассемблере, которая фильтровала строчный сигнал от ПЗС (прибор с зарядовой связью), обрезала шумы и записывала результат в массив кадра. Она должна была выполняться менее чем за 12 мкс — продолжительность обратного хода строчной развертки ПЗС-матрицы. Это всего 60 тактов процессора!
Позже я руководил лабораторией, затем отделом программного обеспечения системы управления роботом.
Другие языки:
- FORTRAN
- ALGOL
- PASCAL
- BASIC
- C++
- PROLOG
- HTML+CSS+JS